研究というのはできないことに挑戦していくほうがいい東京電機大学 工学部 機械工学科 先端機械コース 教授 堀内 敏行
どうしたら日本一,世界一を目指せるか
聞き手:まずは,光リソグラフィ,小型空中静止飛翔ロボットについて,研究に至ったきっかけをお教えください。堀内:私は,1997年に東京電機大学に赴任しましたが,その前のNTTの研究所でも光リソグラフィの研究を行っていました。といっても名前こそ一緒ですが,NTTでは通信用のメモリや論理回路などの集積回路の素子を作るための光リソグラフィの研究でした。当時はフロッピーディスクもなかった時代ですが,電信電話事業に必要な部品ということだけではなく,汎用性がある基礎技術として集積回路をなるべくコンパクトに,なおかつ速く動き,機能もたくさん付けるため,パターン寸法を極限まで微細化する目的で光リソグラフィ技術を研究していました。
その後,東京電機大学に来ることになりましたが,最初は大学へ来るとは思っていませんでしたから,研究テーマに非常に悩みました。自分で一番得意なところをやるのがいいと考えたのですが,NTTで行っていたパターン寸法が非常に小さい光リソグラフィを研究するには,高額な設備や広いスペース,クリーンルームといったものが必要です。そしてそれらを準備することはなかなか難しく,企業や大きな研究所とまともに競争しても勝てないので,どうしたら日本一,世界一を目指せるかを考えました。そこで出てきたのが,集積回路以外の用途に対するパターン寸法が大きい光リソグラフィ技術です。
これは今でも変わっていないのですが,小さな部品や,細かいパターンの作成に,光リソグラフィ技術を気楽に安価で利用したいという人は意外と多いのです。最小寸法が20nmといった集積回路のオーダーではなく,その何千倍にもなる人間の髪の毛(70~100μm)ほどのパターンでも,一般常識では十分に細く,この大きさのものを作るのに光リソグラフィを使いたいという方が結構いらっしゃるんです。
しかし,この程度のパターンを作ろうとする場合でも,安い装置があまりありません。一般的なリソグラフィ用の市販露光装置は,ある程度微細なパターンまで形成できるように作られているので,安くても1,000万ほどはします。ですから,何十万個も何百万個も製品を作るのでなければおいそれとは導入できません。そのような背景もあって「集積回路よりずっと大きいパターンができればいい。そのかわり安くかつ,早くできて,装置の面倒なメンテナンスもなく,極端に言えばクリーンルームの中でなくても使える程度でいい」といった用途が,結構たくさんあるんです。また,シリコンウエハのような平坦で一定寸法の基板ではなく,不定形のプラスチック,金属の基板や線材,管材の表面などに大きい寸法の微細パターンを形成したいという用途も多々あることが分かりました。そこで,こうしたニーズに応えられる,簡便安価なリソグラフィ装置とリソグラフィプロセスの開発を大学での研究ターゲットにしようと思い立ったのです。
これまでに力を入れて来たものとして,厚膜(厚さ100~200μm)パターンの形成があります。平面的な形状に加えてパターンの側壁を垂直にしたり丸くしたり意のままに制御する技術です。一方,立体的な棒の上にパターンを作るとか,直径1~2mmの細い筒の内側にパターンを作るとか,世の中に売っていないどころか,発案もされていないものを開発しようと努力しています。
厚膜パターン形成の例としては,マイクロミキサー(図1)とかマイクロリアクターとか,垂直側壁流路パターンの自由自在な作製があります。

図1 マイクロミキサーパターンの形成例
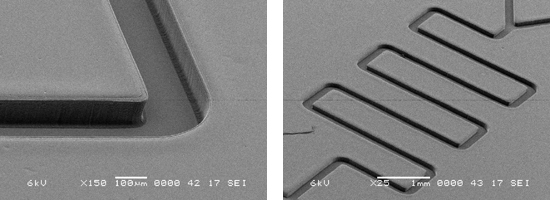
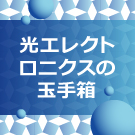
図2 マイクロレンズアレイパターンの形成例
こうした大きさのパターン形成や,線材,管材の表面上へのリソグラフィの研究は,専門にやっているところが世界的に見てもあまりないので,今はのびのびとやらせていただいている状況です。安価な露光装置の開発が重要な目標ですので,どの装置も100万円~200万円の製作価格で試作しています。
一方,飛翔ロボットの研究を始めた理由ですが,上述の光リソグラフィ技術の研究で,いただいたニーズだけではなく,自分たちでも積極的に何かに活用できるところを探そうと思いまして,学生たちと何を作ってどうするかということをいろいろ考えました。その中から,小さいロボットができるかやってみようというところに辿り着いたのです。当時もいろいろロボットの研究はありましたから,よそがやっていないことをやらなければということで,何か飛ぶ昆虫みたいな物を作ってみようと考え,飛翔ロボットが出てきたのです。
今思うともう少しよく調査をしてから始めればよかったのですが,実際に1,2年やってみると,小さいと非常に浮きにくいということが分かりました。例えば,昆虫の蚊は血を吸うポンプも付いていれば,人にとまっても分からないぐらいの軽さです。すごい性能ですが,同じようなものを作ろうとしても,なかなかうまくいかないんです。
人工的なメカニズムで浮力を得て空中で静止させるには,ヘリコプターみたいな回転翼が,一番いいということが分かりました。回転翼の揚力は翼の長さの3乗と翼の幅(翼弦),に比例します。ですから,ディメンジョンで言うと長さの4乗に比例するので,設計で大きさをちょうど半分にすると,重さは8分の1になるのですが,揚力は翼の長さの3乗掛ける幅で4乗に比例するので,16分の1になるんです。ですから,小さくすると,よほど考えないと飛びようがないんです。
小さい飛翔ロボットを目指して始まった研究は,最初はハチだったはずが,セミでも駄目,トンボでも駄目とだんだん大きくなって,結局今はニワトリより大きいぐらいになってしまいました(笑)。
このぐらいの大きさですと,わりといろいろ積めますし,それらしく飛ぶようになってきました。ところが,当初は小さいサイズでしたから,光リソグラフィを使おうと思っていたのですが,こんなに大きくなると必要がないんですよ。
しかし,飛翔ロボットはサイズが大きくなってもやるべきという周辺からの声や興味を示す学生があるため,光リソグラフィの研究とは切り離してそのまま研究を続けることにしました。ですから私の研究室は非常に異質な2チームで編成されるという状態になっています。 <次ページへ続く>

堀内敏行(ほりうち・としゆき)
1948年 神奈川県生まれ。1970年東京大学工学部機械工学科 卒業。1970年 日本電信電話公社入社。1997年 東京電機大学 工学部 精密機械工学科 教授。現在,東京電機大学 工学部 機械工学科 先端機械コース 教授。●研究分野:光リソグラフィ,マイクロ部品製作技術,小型飛翔ロボット
●現在,電気学会 リソグラフィ次世代技術調査専門委員会 委員長。応用物理学会 シリコンテクノロジー分科会 幹事。精密工学会 代議員。国際シンポジウム フォトマスクジャパン 組織委員会 委員長。















![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)