研究室探訪vol.4 [東京工業大学 奥富・田中研究室]奥富 正敏 教授,田中 正行 特定准教授,鳥居 秋彦 助教,紋野 雄介 研究員
あの研究室はどんな研究をしているのだろう? そんな疑問に答える“研究室探訪”。
今回は,東京工業大学 奥富・田中研究室にお伺いしました。




今回は,東京工業大学 奥富・田中研究室にお伺いしました。
コンピュータによる「すごい視覚」を実現する!
コンピュータが世界を見たり理解したりすることを可能にする。あるいは,人が見ることができないものを見えるようにする。そのための理論や実際の応用について研究している。コンピュータビジョン・画像処理の技術は,近年急速に発展し,実社会への応用展開も急速に進みつつある。当研究室は,本分野において幅広く研究を行い,CVPR, ICCV, ECCV, ICIP, ICRAといったメジャーな国際会議で常に研究発表を行うかたわら,研究成果の実用化や企業との共同研究にも力を入れている。奥富 正敏 教授
コンピュータビジョン,画像処理,画像センシング,画像認識等に従事。
コンピュータビジョン,画像処理,画像センシング,画像認識等に従事。
田中 正行 特定准教授
画像処理,マルチモーダル画像処理,画像融合,深層学習等に従事。
画像処理,マルチモーダル画像処理,画像融合,深層学習等に従事。
鳥居 秋彦 助教
コンピュータビジョン,3次元復元,画像検索,カメラローカリゼーション等に従事。
コンピュータビジョン,3次元復元,画像検索,カメラローカリゼーション等に従事。
紋野 雄介 研究員
画像処理,画像復元,カラーイメージング,マルチスペクトルイメージング等に従事。
画像処理,画像復元,カラーイメージング,マルチスペクトルイメージング等に従事。
[研究テーマ1] 3次元復元を行うシステムの開発
本研究は,画像の入力に対して被写体形状等の撮影環境の高精細な復元を行うことを目的とする。研究室が開発したOnlineSfMシステムは,ドローン等を用いて連続的に撮影される画像に対して手元のPC上で撮影位置姿勢と被写体3次元形状の逐次的な復元を行い,撮影者にインスタントな復元結果を提供するもので,災害現場等での操縦補助や効率の良い撮影環境の把握が実現できる。また,逐次的な復元結果を基にしたオフラインでの解析により,撮影時の光源の分布と被写体の反射率を分離し,より高精細な3次元モデルを生成できる。このような高精細3次元モデルは,ゲーム・VR等のエンターテインメントへの利用だけでなく,画像入力に対して自己位置情報を提供する3次元データベースとしての応用も期待され,広く注目されている。さらに,復元されたモデル・撮影位置姿勢に基づき,撮影環境の異なる入力画像に対して頑健な位置姿勢推定を行うシステムの開発も手掛けており,自動運転車・ロボット等への自己位置情報の提供や,ナビゲーションシステムへの応用が期待される。
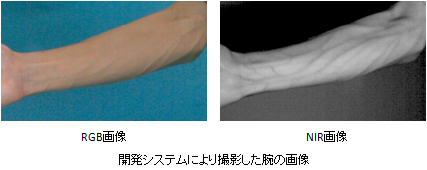
[研究テーマ2] 可視光と近赤外光を同時に撮像可能な撮像素子の開発
研究室の特徴として,企業との共同研究も多く,実社会にも応用できることを目標としている。これもそのうちの1つである。カラー(RGB)画像と近赤外線(NIR)画像のペアを利用した画像応用技術は,従来,複数台のカメラや複数回の撮影を必要とするものが一般的で,撮影に手間がかかる,動画像撮影ができない,撮影機器が大がかりで高価である,などの問題があり,広く普及するに至っていない。そこで,研究室では,オリンパス(株)と共同で,カラー画像と近赤外線画像を1つの撮像素子で同時に撮影可能なイメージングシステムのプロトタイプを開発した。本システムでは,可視光(カラー情報)と近赤外光を同時に撮像可能な撮像素子および撮像データをリアルタイムで処理する画像処理システムを開発することで,1つの撮像素子によるカラー画像と近赤外画像のリアルタイム同時撮影を実現した。現在のシステムはプロトタイプのため,今後は実用化に向けたシステム設計やカメラモジュールの開発を行い,応用展開を図る。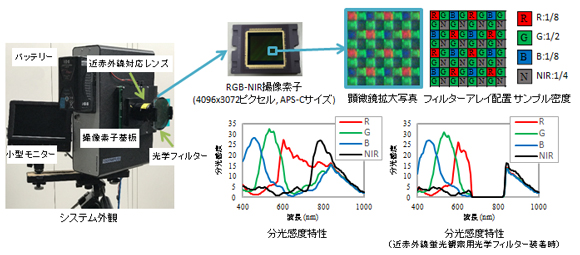
[研究テーマ3]AIで悪条件下の視認性を格段に向上する「マルチモーダル画像融合技術」
近年,画像センサーの技術的な進化や低コスト化を背景に,熱を捉えるサーモカメラや物体の内部を捉えるX線・テラヘルツ波・ミリ波のカメラなどの非可視光カメラを活用し,夜間や濃霧などの悪天候,または逆光や遮蔽などの悪条件下でも,監視や診断を行う用途が広まりつつある。しかし,これら非可視光カメラは,可視光に比べ解像度や画質が低く,視認性が悪いため,可視光カメラを併設し,両方の画像を見比べながら監視や診断を行う必要があり,素早く正確に対象物や状況を判断することが困難だった。そこで,研究室はNECと,専門家の変換ノウハウを学習したAIを用いて,可視光カメラと非可視光カメラの画像を自動的かつ効果的に統合し,対象物・状況の視認性を格段に高め,劣悪な環境でも素早く異常や危険物の有無の判断を可能とする「マルチモーダル画像融合技術」を共同開発した。
可視画像
マルチモーダル画像融合技術による画像
奥富・田中研究室より
研究室では,いろいろなタイプの画像処理を研究しているが,あらゆる可能性を追求し,特に限定をすることなく何ができるかを求めていく姿勢がある。研究室として,学術的な研究成果を追求することはもとより,実社会への応用に対しても力を入れている。企業との共同研究も数多く行っており,多数の特許出願もある。イノベーションを創出すべく,活動に参画したい学生や協業パートナーを募集中。 東京工業大学 奥富・田中研究室
東京工業大学 工学院 システム制御系
住所:〒152-8550 東京都目黒区大岡山 2-12-1-S5-22 大岡山キャンパス 南5号館 301A号室
TEL:03-5734-3472 FAX:03-5734-3483
E-mail:mxo@sc.e.titech.ac.jp
URL:http://www.ok.sc.e.titech.ac.jp/

![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.29 [大阪大学 山本・生田研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/09/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.28 [東海大学 藤川研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/07/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.27 [東京大学 生産技術研究所 志村研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/05/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.26 [慶應義塾大学 神成淳司研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/03/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.25 [東京大学 竹内 渉研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/01/laboratory1.jpg&w=40&h=40&zc=1&q=100)








![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)