セミナーレポート
断層撮影にとどまらず,機能や動態が把握可能に藤田保健衛生大学 片田 和広
本記事は、画像センシング展2012にて開催された特別招待講演を記事化したものになります。
X線を当て,その通り難さをコンピューターで計算
現在,病気の発見・診断から,治療の判断,手術するかどうかの決定,治療効果の判定,再発の有無まで,医療の中で重要な役割を果たしているのがCT(Computed Tomography;コンピューター断層撮影)です。これだけ広い範囲で使われているCTなしの医療は,目隠しをしてサッカーをするようなものです。CTはいろいろな方向からX線を当て,X線の通り難さをコンピューターで計算することで,身体の断面を画像として見ます。最近では,断層ではなく,かたまりで撮り,かたまりで見るようになっているので,CV(Computed Volumegraphy)と呼ぶ方がよいかもしれません。 センシングデバイスとしてのCTは,X線を情報キャリアに,投影断面定理に基づいて画像再構成をするもので,広い意味での非破壊検査です。対象が人間(病人)なので,短時間での検査と低侵襲性(放射線被ばくの低減)が欠かせません。その原理は,1917年に数学的に証明されていましたが,1972年に英国で発明され,1975年に国産1号機が開発されました。
画像の再構成にあたって,単純な逆投影法ではボケが生まれることから,FBP(フィルター補正逆投影)法が考えられ,ボケを打ち消すことができるようになりました。しかし,FBP法は部位によって,最適なフィルターが異なるなどの問題がありました。そこで,1980年代後半に,CT装置の中を患者を乗せたテーブルが一定の速さで移動して,らせん状に身体をスキャンするヘリカルスキャンCTが開発されました。ヘリカルスキャンによって,身体をかたまりで撮れるようになり,CG(コンピューターグラフィックス)が利用できるようになりました。 しかし,検知器が一列だと時間がかかることから,検出器を増やして一度にたくさんの断面が撮れ,検査時間も少なくて済むマルチスライスCTが生み出されました(図1)。
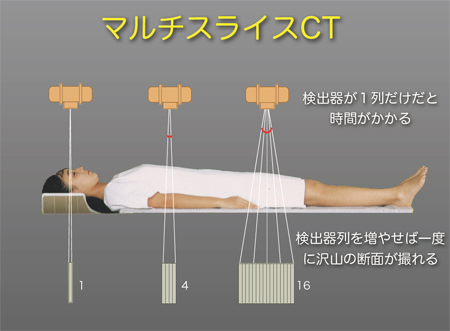
図1 マルチスライスCT
<次ページへ続く>

藤田保健衛生大学 片田 和広
1972年大阪医科大学卒業,名古屋市立大学第二外科,名古屋保健衛生大学脳神経外科を経て,1985年藤田保健衛生大学医学部放射線医学教室助教授,1987年同大衛生学部診療放射線技術学科教授。2001年4月より同大医学部放射線医学教室教授。1975年に国産第1号CTの導入をきっかけとして,現在までCTの開発に従事。専門分野は神経放射線学。ヘリカルスキャンの実用化により日経BP技術賞(1992年),通商産業大臣賞(1993年)受賞。















