セミナーレポート
生活・社会・産業の各分野で進む実用化 プロジェクターの高速化などで,発展する3D画像センシング技術オムロン(株) 諏訪 正樹
本記事は、画像センシング展2013にて開催された特別招待講演を記事化したものになります。
実用化が進む3D画像センシング技術
カメラから取り込まれた画像データを利用する3D画像センシングの実用化が進んでいます。オムロンが開発したシルエットビジョンセンサーは2001年から全国の道路に設置され,縦ステレオカメラを使い3次元形状で車両を認識,車の速度や通行量,大きさなどの統計をとっています。その他にも,前方の障害物を立体的に認識する運転支援システム,バラ置き・バラ積みのワークを認識し,ロボットで把持するロボットピッキングセンサー,アクティブ三角測量方式による非接触3Dスキャナー(デジタイザ),複合アクティブ三角測量方式による化粧・医療・整形外科用の人体計測,ゲーム用インターフェースなどさまざまな分野で使われています。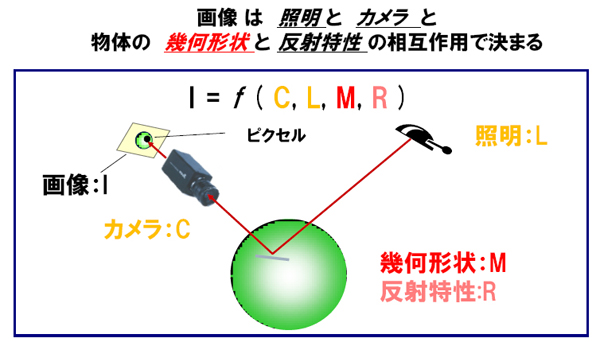
図1 幾何形状(3D情報)は画像センシングにおける貴重な情報源
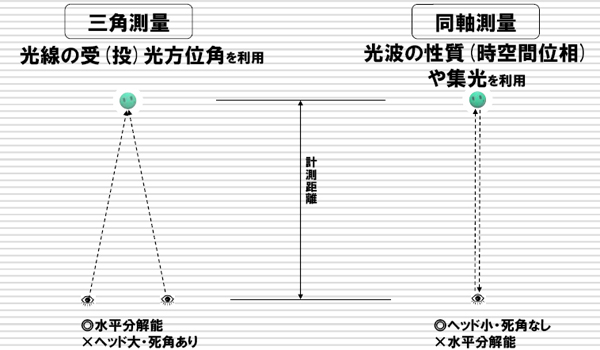
図2 三角測量と同軸測量
<次ページへ続く>

オムロン(株) 諏訪 正樹
- 1997年4月
- オムロン(株) 入社
- 2008年4月
- オムロン(株) 技術本部コアテクノロジーセンタ 技術専門職
- 2010年4月
- 立命館大学 理工学研究科 客員教授 兼任
奈良先端科学技術大学院大学 情報科学研究科 客員教授 兼任
















