セミナーレポート
ロボットが目で見たものを掴むまで 3次元ビジョンセンサー,認識アルゴリズム,認識と動作のキャリブレーションを組み合わせる三菱電機(株) 堂前 幸康
本記事は、画像センシング展2013にて開催された特別招待講演を記事化したものになります。
ロボットで,バラ積み物体を掴んで取り出す
工場における生産システムは1990年代からセル生産方式に変わりましたが,人によるセル生産は作業者のバラつきがあります。そこで,セル生産を自動化し,多様化するニーズにフレキシブルに対応することを狙って,産業用ロボットシステムが開発されています。三菱電機先端技術総合研究所で開発したロボットセル生産システムは,2台の産業用ロボットの後ろに部品供給スペースがあり,ロボットがそこから部品を取り出して,産業用ブレーカーを組み立て,最後に払い出しするようになっています。一般的な産業用ロボットは6自由度運動で,高精度・高速な繰り返し動作に強いため,物体の搬送が可能です。しかし,そのためには,複雑でやっかいな教示で動作を覚えさせる必要がありました。実際,ロボットが例えば環境の5個所を高い精度で突くようにするために,作業者がコントローラーを持って,位置決めを延々と繰り返していく大変な作業が欠かせませんでした。
そうした負荷のかかる教示作業を行わずに,バラ積み部品供給をロボットができるようにするためには何が必要なのでしょうか。整列させた部品供給は,教示により,ロボットで部品を掴ませることができますが,供給スペースが大きくなってしまいます。一方,バラ積み部品供給は少ないスペースに大量で供給できますが,作業中に位置姿勢が変わるので,教示したロボットでは掴めません。
人はどれが掴めるか考えながら,取り出すので,バラ積み物体を掴んで取り出せますが,ロボットはできないのです。
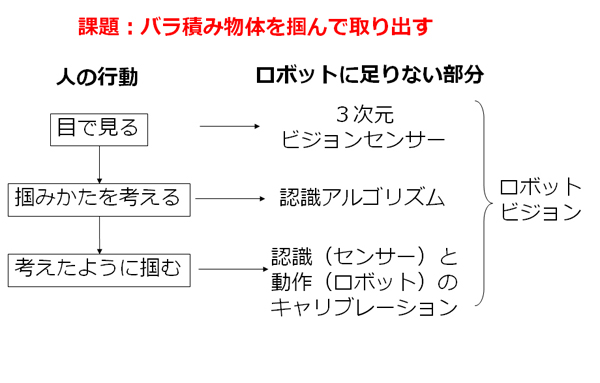
図1 人の行動に当たるロボット技術
<次ページへ続く>

三菱電機(株) 堂前 幸康
- 2004年
- 北海道大学工学部システム工学科卒業
- 2006年
- 北海道大学大学院情報科学研究科システム情報科学専攻修了
- 2008年
- 北海道大学大学院情報科学研究科システム情報科学専攻博士後期課程単位取得退学
- 2008年
- 三菱電機株式会社入社、先端技術総合研究所勤務
- 2012年
- 北海道大学情報科学博士
















