セミナーレポート
高速画像処理、実現への道東京大学 石川 正俊
本記事は、国際画像機器展2010にて開催された特別招待講演 プレインタビューを記事化したものになります。
実践の土台となる1/1,000秒を捉える“道具”はどのようにできあがったのですか
25年ぐらい前、つくばの研究所で大きな予算が「触覚」の研究でつきました。触覚、つまり圧力分布ですね。触覚以外のセンサも含めていろいろなセンサ情報をフィードバックしてロボットを動かそうと試みました。当時は、力(ちから)フィードバック(ロボットが握手をする際の力加減など)はそこそこの研究ができていました。このときのフィードバックレートが1ms(=1/1,000秒)でした。触覚も圧力分布なので測定レートを1msとしました。これに比べて当時、視覚(ビジョン)はとてつもなく遅かったのです。そのころ研究費で購入したリアルタイム「高速」画像処理装置の処理速度は1/30秒のフレームレートでした。「なぜビジョンの世界は1/30秒で『高速』と言うのだろう」と、そのとき疑問を抱きました。根底から考えなければいけない。「触覚と力が1msなのだから、ビジョンも1msにする」とその場で決めました。触覚の研究では触覚情報のためのパターン処理LSIを作りました。パターン情報が来れば、触覚だけでなく何でも1/1,000秒で処理できるというチップでした。チップを作るとなると、製造上、同時に2,000個ものLSIが出来上がってしまいます。そのうち触角研究に使ったのは、わずか1個だけでした。そこで、残り1,999個から512個を使って1m×1mの画像処理装置を作ったわけです。これが、完全並列でフォトディテクタ1個にプロセッサ1個をつけた世界で最初の1/1,000秒の画像処理装置でした。1985~86年にLSIの製作に取り掛かり、1993年に画像処理装置を発表しました。1999年にはワンチップバージョンをISSCC(国際固体素子回路会議)で発表しました。
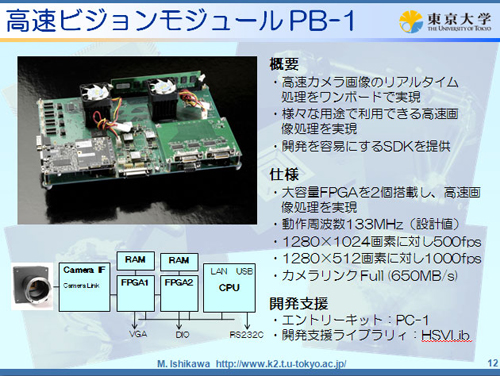
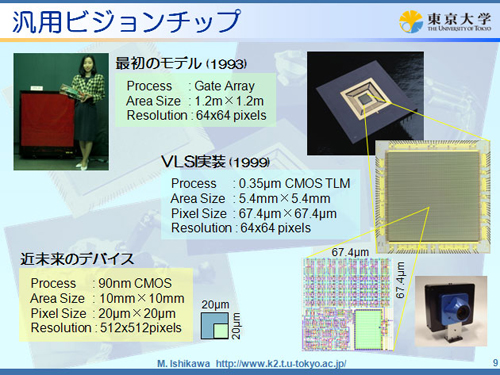 現在このチップは、周辺機材の変化などをふまえて「ビジョンチップ」という言い方から「高速ビジョン」と言うようになっています。カメラリンクの登場でボードでも1ms対応が見えてきています。チップは初期投資が大きいので「産業用はボードで民生用はチップで」と考えています。
現在このチップは、周辺機材の変化などをふまえて「ビジョンチップ」という言い方から「高速ビジョン」と言うようになっています。カメラリンクの登場でボードでも1ms対応が見えてきています。チップは初期投資が大きいので「産業用はボードで民生用はチップで」と考えています。
 <次ページへ続く>
<次ページへ続く>

東京大学 石川 正俊
1979年東京大学大学院工学系研究科計数工学専門課程修士修了。同年通商産業省工業技術院製品科学研究所入所。1989年東京大学工学部計数工学科助教授,1999年同大学工学系研究科計数工学専攻教授,2002年同大学総長特任補佐,2004年同大学副学長,2005年同大学理事・副学長,同年同大学情報理工学系研究科創造情報学専攻教授。現在に至る。工学博士。日本ロボット学会,計測自動制御学会,応用物理学会,日本機械学会等から,論文賞,技術賞,業績賞など多数受賞。計測自動制御学会および日本ロボット学会フェロー。東京大学 石川小室研究室の動画像一覧はこちら