画像センシングの最前線
先進運転支援システム( ADAS ),自動運転のための画像センシング技術名古屋大学 二宮 芳樹
3.車載画像センシングのための認識アルゴリズム
ADAS,自動運転のための外界の認識対象は,特定用途のADASではそれに必要な車線や障害物になるが,自動運転では走行可能領域,交通信号・標識など全ての走行環境の対象に拡大する。また,自動運転では高精度な道路地図を用いる例が多く,位置決めのための地物などの認識も必要になる。現在,ADAS等の車載センシングで実用化されている画像認識アルゴリズムは,ステレオビジョンに代表される構造推定と歩行者認識に代表されるパターン認識の2つのアプローチに二分できる。前者の代表的な実用化例は,スバルのEyeSight,ベンツのSMPC ( Stereo Multi-Purpose Camera ) がある。ステレオビジョンのマッチング処理はこれまではブロックマッチングのようなローカル法が主流であったが,最近はセミグローバルマッチングのような密な距離画像が得られるグローバル法が車載用途でも用いられるようになった。構造推定アプローチでは,推定結果の三次元構造に基づき路面と障害物の分離が比較的容易に行えるため,自動ブレーキなどに用いられてきた。
後者のパターン認識の代表的な実用化例は,VolvoのHuman Safetyなどに使われているMobileyeの画像技術である。最近はパターン認識による車両や歩行者認識結果に基づくACCや自動ブレーキも実用化されている。パターン認識による歩行者認識は,2000年代に機械学習によって進展した。HoG ( Histograms of Oriented Gradients ) 特徴やSVM ( Support Vector Machine ) 識別器,さらにDPM ( Deformable Parts Model ) により,性能向上は進み,最近は深層学習 ( Deep Learning ) で大きな飛躍が実現されている。深層学習の一例である中部大学機械知覚&ロボティクス研究グループ(藤吉研究室)で開発されたCNN-Dn’MI ( Convolutional Neural Networks drop and Median Inference ) 法について,歩行者検出例(図1)とCaltech 歩行者DBでの従来法との認識性能比較例(図2)を示す*1。
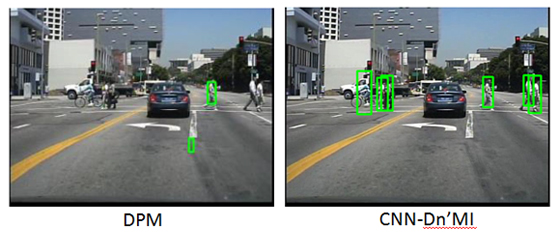
図1.DNN-Dn’MIによる歩行者検出例
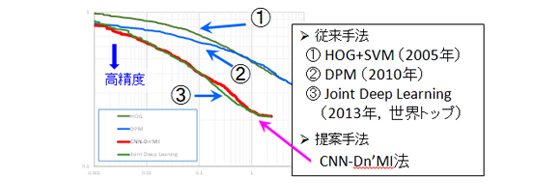
図2.CNN-Dn’MIのCaltech Pedestrian Datasetでの比較例
参考文献
- 福井宏, 山下隆義, 綿末太郎, 山内悠嗣, 藤吉弘亘, 村瀬洋 “Drop and Median Inferenceによる歩行者検出の高精度化”,ビジョン技術の実利用ワークショップ, 2014
<次ページへ続く>

名古屋大学 二宮 芳樹
1983年 名古屋大学 工学研究科 電子工学専攻 終了車の知能化、自動運転の研究に従事
1983年 (株)豊田中央研究所 入社
2004年 (株)豊田中央研究所 走行支援センシング研究室 室長
2011年 (株)豊田中央研究所 情報エレクトロニクス研究部 部長
2014年 名古屋大学 未来社会創造機構 モビリティ部門長 特任教授(工学博士)
















