画像センシングの最前線
電車線インフラ設備における画像センシング技術庭川 誠
2-2 パンタグラフの接触力測定技術
接触力とは,パンタグラフと架線の間に作用するする力である。従来は,加速度センサや歪ゲージをパンタグラフの内部に実装して接触力を測定していた。しかし近年のパンタグラフは,追従性向上のために複雑な構造を備えたパンタグラフが使用されており,この中に加速度センサなどを実装することが困難なケースが生じている。これに対して画像処理の場合は,パンタグラフの挙動をカメラで撮影し,この挙動を画像処理することで,パンタグラフへの加工なしで,パンタグラフの接触力を測定できる(図3,図4)。画像処理で力を算出することは,一見不思議な測定方法であるが,パンタグラフへの加工が不要で,かつ非接触で接触力を測定できる利点があり,下記の式(1)と画像処理で求められる変位を使用して接触力を算出すれば,国際規格(IEC規格)の原案EN50317:2012で定められている周波数帯DC~20Hzの接触力測定精度を満足することが分かっている。
Fc = Fb + Fine + Faero ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ (1)
接触力Fcはバネの反力Fbと慣性力Fineと空気力Faeroの合計によって表される。バネの反力Fb,慣性力Fine,空気力Faeroは以下の式で求めることができる。
Fb = k(バネ乗数)×x (バネ伸縮量) ・ ・ ・ ・ ・ ・ ・ ・(2)
Fine = M(等価質量)×a (舟体の加速度) ・ ・ ・ ・ ・ ・(3)
Faero = 1/2 CL ρV2 S ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ (4)
なお,式(4)において,CLは揚力係数,ρは流体の密度,V は走行速度,S はパンタグラフの代表面積をそれぞれ表す。バネの伸縮量,加速度,走行速度以外のパラメータは,実験的に求めることができるので,上記のxとaを画像処理によって求める。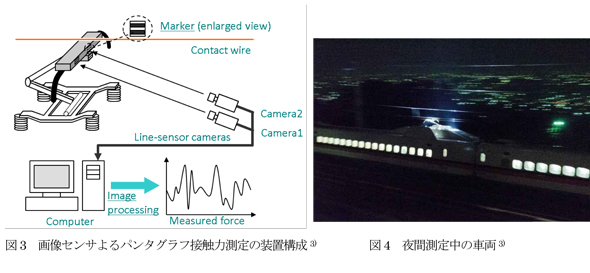 2-3 わたり線測定技術
2-3 わたり線測定技術
電車線のなかでも,図5は架線の構成が複雑なわたり線箇所で,架線事故を未然に防止するため,本線とわたり線の離隔距離に基準が定められている。この基準は図5に示す軌道中心から900mm位置に近接するわたり線高さと本線高さの離隔距離で,交差型のわたり線及び、無交差型のわたり線を測定対象にする必要がある。
わたり線の位置は,レーザ測定でも測定可能だが,2台のラインセンサによる三角測量方式を適用した。これは高速鉄道に適用する場合,スキャン周期を高周波数にできるラインセンサが有利で,ラインセンサには細かい測定ピッチで測定できる利点がある。図 7 は,ラインセンサで得た画像を基に三角測量で測定した本線及びわたり線の三次元位置のグラフである。グラフ中の誤差は,手計測した値と画像センサで計測した画像測定値との差異を誤差でプロットした。平均誤差は3.10mmで実用上の精度を満たした。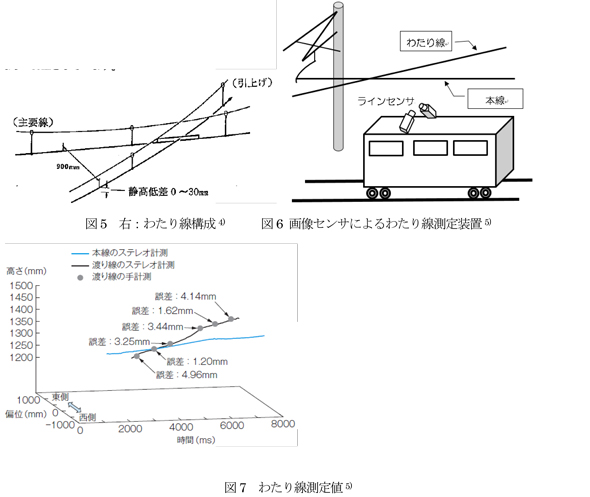 <次ページへ続く>
<次ページへ続く>
接触力とは,パンタグラフと架線の間に作用するする力である。従来は,加速度センサや歪ゲージをパンタグラフの内部に実装して接触力を測定していた。しかし近年のパンタグラフは,追従性向上のために複雑な構造を備えたパンタグラフが使用されており,この中に加速度センサなどを実装することが困難なケースが生じている。これに対して画像処理の場合は,パンタグラフの挙動をカメラで撮影し,この挙動を画像処理することで,パンタグラフへの加工なしで,パンタグラフの接触力を測定できる(図3,図4)。画像処理で力を算出することは,一見不思議な測定方法であるが,パンタグラフへの加工が不要で,かつ非接触で接触力を測定できる利点があり,下記の式(1)と画像処理で求められる変位を使用して接触力を算出すれば,国際規格(IEC規格)の原案EN50317:2012で定められている周波数帯DC~20Hzの接触力測定精度を満足することが分かっている。
Fc = Fb + Fine + Faero ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ (1)
接触力Fcはバネの反力Fbと慣性力Fineと空気力Faeroの合計によって表される。バネの反力Fb,慣性力Fine,空気力Faeroは以下の式で求めることができる。
Fb = k(バネ乗数)×x (バネ伸縮量) ・ ・ ・ ・ ・ ・ ・ ・(2)
Fine = M(等価質量)×a (舟体の加速度) ・ ・ ・ ・ ・ ・(3)
Faero = 1/2 CL ρV2 S ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ ・ (4)
なお,式(4)において,CLは揚力係数,ρは流体の密度,V は走行速度,S はパンタグラフの代表面積をそれぞれ表す。バネの伸縮量,加速度,走行速度以外のパラメータは,実験的に求めることができるので,上記のxとaを画像処理によって求める。
電車線のなかでも,図5は架線の構成が複雑なわたり線箇所で,架線事故を未然に防止するため,本線とわたり線の離隔距離に基準が定められている。この基準は図5に示す軌道中心から900mm位置に近接するわたり線高さと本線高さの離隔距離で,交差型のわたり線及び、無交差型のわたり線を測定対象にする必要がある。
わたり線の位置は,レーザ測定でも測定可能だが,2台のラインセンサによる三角測量方式を適用した。これは高速鉄道に適用する場合,スキャン周期を高周波数にできるラインセンサが有利で,ラインセンサには細かい測定ピッチで測定できる利点がある。図 7 は,ラインセンサで得た画像を基に三角測量で測定した本線及びわたり線の三次元位置のグラフである。グラフ中の誤差は,手計測した値と画像センサで計測した画像測定値との差異を誤差でプロットした。平均誤差は3.10mmで実用上の精度を満たした。

庭川 誠
株式会社明電舎 研究開発本部 基盤技術研究所 知能情報研究部長。2008年電気科学技術奨励賞受賞, 2011年画像センシング技術研究会高木賞受賞,2013年澁澤賞受賞, 博士(工学)
















