
研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]清川 清 教授・内山 英昭 准教授
あの研究室はどんな研究をしているのだろう? そんな疑問に答える“研究室探訪”。
今回は,奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室にお伺いしました。


下向きFoVの増加が,VR体験中の臨場感,自己位置感覚,主体感,身体所有感などの没入感や,その二次的影響としての頭の動きとサイバー酔いについて調べた。その結果,VR用HMDで見過ごされていた下方向の視野を再現するとユーザーが感じる臨場感や自分がどこにいるかという自己位置感覚が向上することがわかった。下方向の視野に自己アバターの姿が見えていることが好影響を与えたと考えられ,さまざまなVRシステムへの応用が期待される。ほかには,現実環境に影を落とすなどリアリティの高い表現が可能な光学シースルーHMD,スマートフォンなどを組み合わせて必要な視野のみに柔軟に映像を提示するHMDなどを開発している。
ほかには,バーチャル球技のための空中で撃力を提示するデバイス,視覚と触覚の提示方法を工夫して自分自身をくすぐることのできるデバイス,空中に浮いたり空を飛んだりしているように感じさせるシステム,実際よりも大きな運動をしているように感じさせるデバイス,食べ物の見かけを変調して味覚を操作するシステム,空中でバーチャル物体の重さや手触り,手応えを感じさせるデバイス,満腹感や蒸し暑さを感じさせるデバイス,座ったままで歩いているように感じさせるデバイス,などを開発している。
TEL:0743-72-5290
FAX:0743-72-5299
E-mail:care-staff@is.naist.jp
URL:https://carelab.info/ja/
今回は,奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室にお伺いしました。
ARやVRのその先へ
サイバネティクスは人とシステムを統一的に扱う学問のことで,リアリティ工学はバーチャルリアリティ(VR),拡張現実感(AR),複合現実感(MR)などを束ねた上位概念として,人間が感じるリアリティを工学的に操作する技術をすべて含む言葉として用いている。 CAREラボではこれらのすべてを対象とし,特に,センシング,ディスプレイ,インタラクション技術について研究している。清川 清 教授
1998年 奈良先端科学技術大学院大学情報科学研究科博士後期課程修了 博士(工学) 日本学術振興会特別研究員 1999年 通信総合研究所(現 情報通信研究機構)研究官 2001年 ワシントン大学ヒューマンインタフェーステクノロジ研究所客員研究員 2002年 大阪大学サイバーメディアセンター助教授 2007年 同准教授 2017年~ 奈良先端科学技術大学院大学 先端科学技術研究科 情報科学領域 教授
1998年 奈良先端科学技術大学院大学情報科学研究科博士後期課程修了 博士(工学) 日本学術振興会特別研究員 1999年 通信総合研究所(現 情報通信研究機構)研究官 2001年 ワシントン大学ヒューマンインタフェーステクノロジ研究所客員研究員 2002年 大阪大学サイバーメディアセンター助教授 2007年 同准教授 2017年~ 奈良先端科学技術大学院大学 先端科学技術研究科 情報科学領域 教授
内山 英昭 准教授
2010年 慶應義塾大学大学院 開放環境科学専攻博士課程修了 2010年 フランス国立情報学自動制御研究所 博士研究員 2012年 株式会社東芝 研究開発センター 2014年 九州大学 大学院システム情報科学研究院 助教 2018年 九州大学 附属図書館 准教授 2021年~ 奈良先端科学技術大学院大学 先端科学技術研究科 情報科学領域 准教授
2010年 慶應義塾大学大学院 開放環境科学専攻博士課程修了 2010年 フランス国立情報学自動制御研究所 博士研究員 2012年 株式会社東芝 研究開発センター 2014年 九州大学 大学院システム情報科学研究院 助教 2018年 九州大学 附属図書館 准教授 2021年~ 奈良先端科学技術大学院大学 先端科学技術研究科 情報科学領域 准教授
[研究テーマ1]ARやVRをより快適に映し出すディスプレイハードウェア
拡張現実(AR)や人工現実(VR)に用いる,これまでにないディスプレイハードウェアに関する研究をしている。VR用の一般的な既存のヘッドマウントディスプレイ(HMD)は,ユーザーに高い臨場感と具現化を提供する。しかし,一般的なVR用HMDの視野(FoV)は,対角方向で約90~110度,垂直方向で約70~90度と,人間本来の視野よりも狭い。具体的には,従来のHMDの下向きのFoVは狭すぎて,ユーザーのアバターの体と足を表示できない。研究室ではこの問題に対処するために,下向きのFoVを約60度増加させるために,一対の追加の表示ユニットを備えた新しいHMDを開発した。下向きFoVの増加が,VR体験中の臨場感,自己位置感覚,主体感,身体所有感などの没入感や,その二次的影響としての頭の動きとサイバー酔いについて調べた。その結果,VR用HMDで見過ごされていた下方向の視野を再現するとユーザーが感じる臨場感や自分がどこにいるかという自己位置感覚が向上することがわかった。下方向の視野に自己アバターの姿が見えていることが好影響を与えたと考えられ,さまざまなVRシステムへの応用が期待される。ほかには,現実環境に影を落とすなどリアリティの高い表現が可能な光学シースルーHMD,スマートフォンなどを組み合わせて必要な視野のみに柔軟に映像を提示するHMDなどを開発している。
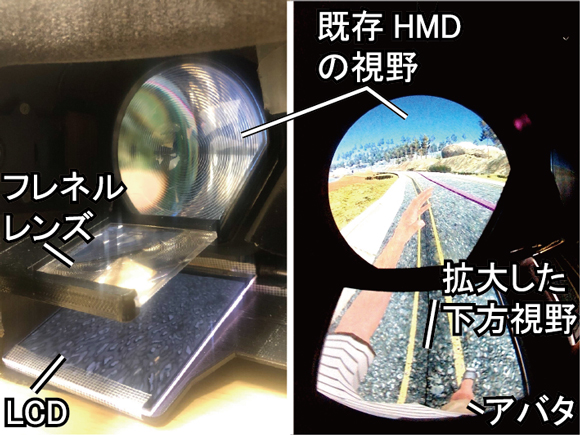
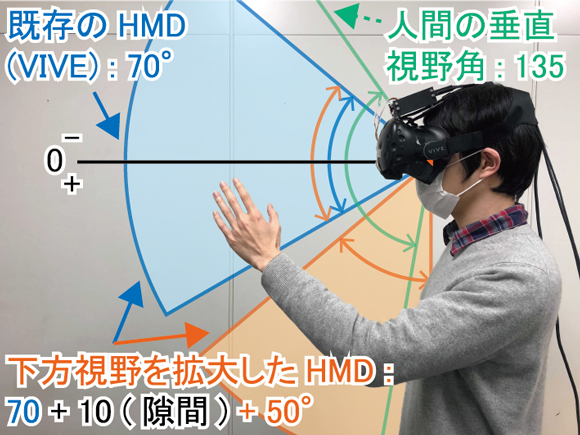
図1 下方視野拡大HMD。ISMAR 2021にて最優秀学生論文賞受賞。
[研究テーマ2]VRにおける没入感が向上するマルチモーダルインターフェイス
視覚や聴覚だけではなく,味覚や力触覚などマルチモーダル(多感覚)の提示を行うための研究をしている。VRにおいて,ユーザーが表示されたバーチャル物体とインタラクションする際には,触覚を付与することで,バーチャル物体への現実感を向上させられる。触覚を付与する手法として,バーチャル物体に似た形状を持つ実物体を身の回りから選び,バーチャル物体の代替として用いる方法が考えられる。しかし,バーチャル物体とまったく同等の物体が存在しない場合,2つの物体が持つ形状の差異に対してユーザーは違和感を抱くと考えられる。そこで,本研究では実物体とバーチャル物体の形状を併せたキメラ物体を新たに提案し,違和感の緩和を目指す。キメラ物体は,実物体とバーチャル物体の空間座標を使用して,バーチャル物体の触覚が重要と思われる部分を実物体に近く,それ以外の部分をバーチャル物体として座標変換して作成する。変形させた物体をバーチャル空間中に表示し,実空間の物体と同期させることによって,実空間中の物体の触覚と,バーチャル物体から得られる視覚情報が一致し,バーチャルリアリティにおける没入感が向上することを確認した。さらに,キメラ物体を作成する処理を理解していないユーザーを対象に,キメラ物体の作成の支援が可能なインターフェイスを構築した。ほかには,バーチャル球技のための空中で撃力を提示するデバイス,視覚と触覚の提示方法を工夫して自分自身をくすぐることのできるデバイス,空中に浮いたり空を飛んだりしているように感じさせるシステム,実際よりも大きな運動をしているように感じさせるデバイス,食べ物の見かけを変調して味覚を操作するシステム,空中でバーチャル物体の重さや手触り,手応えを感じさせるデバイス,満腹感や蒸し暑さを感じさせるデバイス,座ったままで歩いているように感じさせるデバイス,などを開発している。
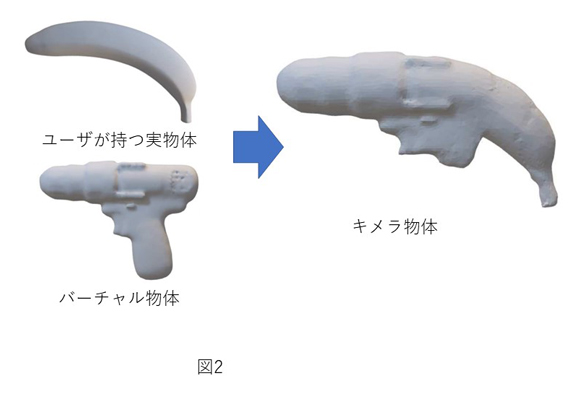
図2 キメラ物体の生成処理。ISMAR2022にて口頭発表。
[研究テーマ3]IMUを用いた6自由度水中オドメトリシステムの基礎検討
人間や環境をセンシングする様々な手法を研究している。対象は人間の位置・行動・生理状態,環境の幾何形状・光源環境,など多岐にわたる。例えば,水中の物体の位置や姿勢をInertial Measurement Unit(IMU)のみで高精度に推定する手法を研究している。水中における6自由度の位置姿勢は,さまざまなシステムの基盤技術である。しかし,機器構成の煩雑さ,利用条件といった制約があるうえ,精度の低さや安定性にも課題がある。研究室では,従来の機器構成や利用条件の問題を解決可能なデバイスとして,IMUに着目した。深層学習の発展にともない,陸上において,深層学習を用いたIMUのノイズとバイアスの状態を推定することで,高精度なIMUオドメトリ手法が提案されている。この技術を拡張することで,水中において6自由度の位置姿勢を算出可能なオドメトリシステムを提案した。水中のIMUデータ計測システムに剛体を通じて固定したマーカを空中で追跡可能とする治具を作製する。これにより,既存のモーションキャプチャシステムを利用し,水上でマーカを追跡することで,水中の位置姿勢の真値計測を実現する。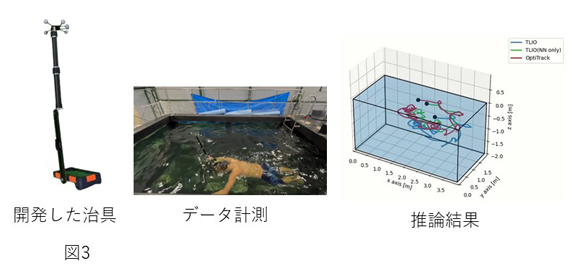
図3 水中における6自由度の位置姿勢計測。IPSJ SIGUBIにて優秀論文賞受賞。
CAREラボより
基礎的なAR研究・VR研究をしっかりするだけではなく,これらの技術やこれらをベースとする周辺技術が一体となって社会全体を変革していくこと,それによってひとりひとりの人間がよりイキイキと生きていけることに強い関心を抱いています。当研究室ではサイバネティクス技術やリアリティ工学技術を使って,もっと人類を幸せにしたいと考えています。奈良先端科学技術大学院大学 先端科学技術研究科 サイバネティクス・リアリティ工学研究室
住所:〒630-0192 奈良県生駒市高山町8916-5TEL:0743-72-5290
FAX:0743-72-5299
E-mail:care-staff@is.naist.jp
URL:https://carelab.info/ja/

![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.29 [大阪大学 山本・生田研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/09/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.28 [東海大学 藤川研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/07/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.27 [東京大学 生産技術研究所 志村研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/05/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.26 [慶應義塾大学 神成淳司研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/03/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.25 [東京大学 竹内 渉研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/01/laboratory1.jpg&w=40&h=40&zc=1&q=100)









![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)