OplusE 2020年3・4月号(第472号)

- 目次
- 特集のポイント
- 広告索引
特集
ライダー技術
- ■特集にあたって ライダー:AIとの融合によるビッグデータセンサーとしての展開
- 慶應義塾大学 神成 文彦
- ■人の動きを可視化する行動モニタリングシステムを活用した社会課題への取り組み
- コニカミノルタ 菖蒲 鷹彦,米竹 淳一郎
- ■自動運転車とライダー
- 慶應義塾大学 大前 学
- ■スローライト導波路を用いたビーム掃引デバイス
- 横浜国立大学 馬場 俊彦
- ■フォトニック結晶レーザーの高輝度化-スマートモビリティ応用に向けて-
- 京都大学 吉田 昌宏,De Zoysa Menaka,石崎 賢司,野田 進
- ■風計測ライダーを支える光源技術
- 三菱電機 情報技術総合研究所*,通信機製作所**,鎌倉製作所*** 廣澤 賢一*,崎村 武司**,今城 勝治*,鮫島 成人*,原口 英介***,亀山 俊平**,安藤 俊行*,柳澤 隆行*,宇藤 健一*
- ■水中ガスラマンライダーによる海中モニタリング技術の開発
- レーザー技術総合研究所 染川 智弘
- ■LEDミニラマンライダーによる水素計測
- 千葉大学 椎名 達雄
- ■花粉や黄砂を計測できるレーザー誘起蛍光スペクトルライダー
- 信州大学*,福岡大学**,情報通信研究機構*** 齊藤 保典*,白石 浩一**,水谷 耕平***
- ■ライダー・人工知能・陸域観測技術に基づくドローンハイウェイ構想
- 理化学研究所 浜中 雅俊
- ■レーザーマイクロホンを用いた深層学習に基づく音声獲得
- 立命館大学 西浦 敬信
特別企画
- ■国際画像機器展2019 特別招待講演【インフラ整備】
- イクシス 山崎 文敬
連載
- ■【一枚の写真】空と偏光
- 東京工業大学 松谷 晃宏
- ■【oe 玉手箱のけむり】その6 光でセンシング
- 伊賀 健一
- ■【私の発言】シンセサイザのように光の優れた性質を自在に操り,力を極限まで引き出し,幅広く科学技術に貢献したい。
- 電気通信大学 美濃島 薫
- ■【輿水先生の画像の話-魅力も宿題も-】第14回 続・似顔絵はAIで描けるか?―等身大の科学技術,その幕開けを見る―A Sequel・How could AI Facial Caricaturing be Possible via Image Technology?- As a Beginning of Life-sized Science and Technology -
- YYCソリューション/中京大学 輿水 大和
- ■【光学ゼミナール】第14回 フーリエ光学
- 宇都宮大学 黒田 和男
- ■【レンズ光学の泉】【新連載】第1章 結像の自由度
- 渋谷 眞人
- ■【波動光学の風景】第141回 143. 異方性媒質での部分反射
- 東芝 本宮 佳典
- ■【研究室探訪】vol. 14 埼玉大学 理工学研究科 小室研究室
- 埼玉大学 理工学研究科 小室研究室
- ■【国立天文台最前線 第12回 世界のミリ波天文学をリードしてきた野辺山宇宙電波観測所
- 荒舩 良孝
- ■【ホビーハウス】「八方睨みの亀の絵」と黒目・白目
- 鏡 惟史
- ■【コンピュータイメージフロンティア】『ハーレイ・クインの華麗なる覚醒 BIRDS OF PREY』『ドクター・ドリトル』『ソニック・ザ・ムービー』『2 分の1の魔法』ほか
- Dr.SPIDER
- ■【ホログラフィ・アートは世界をめぐる】第14回 太陽の贈り物シリーズ part 3 古代ローマ遺跡のインスタレーション
- 石井 勢津子
コラム
■Event Calendar■掲示板
■O plus E News/「光学」予定目次
■New Products
■オフサイド
■次号予告
表紙写真説明
写真の(a),(b)は車に取り付けた可視カメラとKM製3D LiDARで取得した画像である。3D LiDARは物体の3次元位置情報と反射光強度が精密に取得可能であるため,(b)のように走査面内の物体をモノクロ画像のように視覚化できる。(c)は3D LiDARで検知した動態(バスと人)の位置と大きさを表している。検知した動態には直方体の枠がつき,中心が動態の位置,WDHが大きさである。以上の物体の3次元位置(距離)・反射光強度・大きさのデータを10フレーム/s で処理し,独自のアルゴリズムにより人の認識を高精度にリアルタイムで行うことを可能にした。(関連記事「人の動きを可視化する行動モニタリングシステムを活用した社会課題への取り組み」コニカミノルタ 菖蒲 鷹彦 ほか:詳細は168ページ)
特集にあたって慶應義塾大学 神成 文彦
ライダー:AIとの融合によるビッグデータセンサーとしての展開
古典的なライダー(レーザーレーダー Laser RadarはLidarと呼ばれる)のおさらいから始めよう。歴史的にはレーザーの発明以前から,サーチライトの光をパルス化して大気の混濁度が計測されていたが,Qスイッチ動作のレーザーが出現し,1963年には,超高層大気の混濁度や対流圏の粒子状物資が測定されている。1975年には,空間データを処理するためのデジタルデータ処理の自動化も始まっている。ライダーの動作原理を示すために,図1に概念図を示す。
受信光強度PRは,望遠鏡と計測点との距離Rの関数として,以下のライダー方程式によって表すことができる。
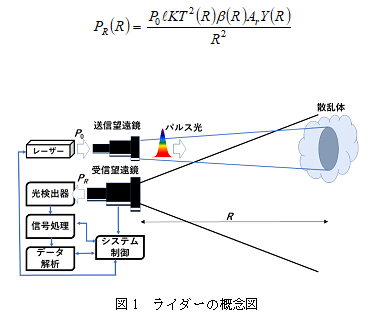
P0は送信レーザーパルスのピーク出力,ℓ=ct/2(cは光速)はレーザーパルスの空間長の半分で,τはパルス時間幅,Kは送受信光学系の伝送効率,T(R)は大気の透過率,β(R)は散乱体の体積後方散乱係数,Arは受信光学系の開口面積,Y(R)は送信ビームと受信視野の重なりを示すパラメータである。対象物が波長より十分に大きい場合,β(R)ℓは物体表面の散乱係数rで置き換えればよい。
ライダーは,(1)ミー散乱ライダー,(2)ラマン散乱ライダー,(3)蛍光散乱ライダー,(4)差分吸収散乱ライダー,(5)コヒーレントライダー,(6)ドップラーライダーなどに分類できる。このうち,(1)~(3)は上式のβ(R)が光と対象物の相互作用の種類が異なる。(4)はDIAL(differential absorption lidar)と呼ばれ,対象となる気体の共鳴吸収波長と非共鳴な2波長パルスを送信して,戻ってくる信号量の比をとって吸収量を求める。(5)はレーザー光の可干渉性を利用するもので,ヘテロダイン検波が用いられる。(6)は散乱体の移動速度を求めるもので,風速なども計測できる。
歴史的に,ライダーは環境計測のための大型システムであり,旧国立公害研究所における大気中の浮遊粒子物質や大気汚染気体の立体分布計測に代表されるようなデータの取得に活躍してきた。もちろん,現在も,国立環境研究所において,2波長(532 nmと1064 nm)のレーザーを用いて散乱信号を測定するほか,532 nmでは散乱の偏光特性も測定し,大気中のエアロゾル計測等が定常的に行われている。
本特集では,水蒸気・風速ライダー,水中でのラマン散乱ライダー,大気中の粒子計測のための蛍光ライダーの新しい機能開発を継続している研究をそれぞれ紹介していただいている。いずれもフィールドワークでの実証と改良の積み重ねが必要であり,ユニークな研究が進められている。
さて,このような大規模な長距離環境計測に加え,近年,レーザー光を用いたリモートセンシングが,高速なデータ処理技術の発展と相まって,リアルタイムでの距離計測手法として,車の自動運転やロボット制御などに利用されている。画像として2次元情報を一括計測できるカメラは,リッチな情報をリアルタイムに取得できるが,ある程度計測距離が長くなり,また精度を要求される場合には,空間走査を必要とするもののライダーの性能のほうが遙かに高い。むしろ冗長性を2次元一括画像計測の利点と捉え,ライダーの距離計測における高精度性と融合することで,機能性を高めることができる。車の自動運転はAI化の象徴的な技術開発であり注目も高い。本特集では,実際に自動運転への応用研究をご紹介いただいた。自動運転のみならず,走行中の計測から走行環境3次元地図を作り出し,その膨大な情報を処理することで事故の発生しやすい場所や状況を解析するツールにもなりそうである。
自動運転もさることながら,さらに期待されているのが,センサー・ネットワークを融合して取得した情報をサイバー空間上で処理・分析して,異常検知や未来の予測に役立てる「IoT・サイバーフィジカルシステム」である。センサーはあらゆるモノが組み込まれる可能性を有しており,インターネットを介してクラウド上にデータとして蓄積される。蓄積されたデータをもとに,機械学習,予測機能を取り込んだ統合システムへと進むことができれば,実空間に埋め込まれた様々なセンサーから送信されるリアルタイムのデータに対して,即座に,災害リスク,健康,安全などの対応を応答できる。レーザーを用いた距離計測はその中のほんの一部でしかないが,短距離でのリモートセンシングもライダーの一部として見るならば,先に挙げた,粒子密度,蛍光識別,速度などの様々な物性を無接触で計測できるセンサーとしての機能は極めて有効であろう。
そのように捉えたときに,ライダー用のレーザー光源デバイス自体の開発も重要で,環境ライダーのような大型装置に要求されるものより,安価でコンパクトな汎用性が必要となる。人の流れを計測するレーザーセンサーは人の購買行動データや工事現場での作業者の行動モニタリングなど,位置,動線,速度をモニターし,カメラ画像との同期により豊富な人間行動モニタリングを実現している。近年,データを単に数値として取り扱うのではなく,意味づけしたタグのようなものと合わせることでデータの付加価値を上げる,セマンティックデータという考え方が注目されている。そういったセンサーネットワークにすでに取り込まれている空間的に広角に検知可能なコニカ・ミノルタの製品の応用例を紹介していただいた。
この,広角にレーザーを走査するという機能はライダー光源には不可欠であり,これを従来の機械式ではなく,より高速にかつ低電力で,装置としてコンパクトに実装しようという研究が,最先端のレーザー技術を用いて行われている。本特集では,フォトニック結晶構造を使った2種類の方式をそれぞれ解説いただいた。1つは,光の波長程度の周期的な屈折率分布をもつフォトニック結晶を用いることで,半導体レーザーそのものでビーム出射方向を自在に制御する方式である。もう1つは,光の速度を遅くすることで,実効的な屈折率を大きくして偏向角を増大化しようというアイデアである。こういった技術は,本当にこれらのデバイスが安価にできれば,現在は試行的に自動車のボンネットに回転する台座を載せて実現しているライダー計測を,ヘッドライト周辺にコンパクトに装着するのに不可欠な技術になるかもしれない。
安価という意味では,もしLEDによるリモートセンシングが可能になるのであれば,画期的であり,そういう新しい挑戦の紹介も執筆をお願いした。
最後に,ライダーを,より広いフィールドで,かつ機動性に優れた応用に展開する際に欠かせないのが,ドローンとの融合である。すでに,森林や農業での利用のデモがネットで多く掲載されている。本特集では,個々の計測例ではなく,ライダー搭載ドローンが集団で機能することで,さらに付加価値を増大できるドローンハイウェイという構想について解説いただいた。連携して取得したデータを高速に処理することで,膨大なパラレルデータを時空間的に同期して取得・解析できることで,前述の「IoT・サイバーフィジカルシステム」を巨大な時空間で展開できることになる。そこには,距離,物性パラメータ計測に加えて,人間の五感情報も重要であり,「音」の計測は貴重な情報源になるのではないだろうか。それも,空間全体の音の集団ではなく,ピンポイントに指向性をもった音計測を可能にするのがレーザーマイクロフォンである。さまざまな開発が行われているが,その一端をご紹介いただいた。
10年前であれば,ライダー特集は環境ライダーの紹介に終始していたのではないかと思われるが,センサーネットワーク,ビッグデータ,セマンティックデータを自在に操ることができるAI処理の波が,古典的ライダー研究を強烈に突き上げている様相である。
広告索引
資料請求
エラー: コンタクトフォームが見つかりません。








![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}