セミナーレポート
誕生間近の自ら学習し,人のために働くロボット東京工業大学 長谷川 修
本記事は、画像センシング展2012にて開催された特別招待講演を記事化したものになります。
人間の脳をヒントにした情報処理技術を独自開発
ネット上にはノイズはあるものの,膨大な情報が存在し,世界中で日々,更新されています。こうして蓄積されるビッグデータはまさに宝の山で,そこから意味のある情報を取り出すことができれば,学習をはじめ,さまざまな形で使うことができます。こうした問題意識のもと,東京工業大学 象情報工学研究所 長谷川修研究室は,電脳情報や実環境から自力で学習し,その知識を教え合うことで,人に手間を取らせずに,人のために働く情報機器やロボットなど知的システムを作り出すことを目指して,研究に取り組んでいます。そのために,独自開発したのが,コンピューターやロボットが「見て,聞いて,覚えて,考えて,行動する」ための,人間の脳をヒントにした情報処理技術「自己増殖型ニューラルネットワーク(SOINN)」です。
SOINNは人間の脳のように,視覚,聴覚,触覚,モーターの時系列制御信号のようなマルチモーダル・パターン情報を超高速で,発達的(オンラインかつ追加的)に学習できます。そして,学習したパターン情報から,ネットワークの組み方を工夫することで,連想,推論,転移などの高次知能情報処理を行うことが可能になります。
インターネットから画像をダウンロードしてきて,あらかじめイスやペン,腕時計をSOINNが学習済みの場合,全く別の腕時計をWebカメラで撮影し,ノートパソコン(PC)の実行画面で,SINNが認識できるかどうか試すと,直ちに腕時計と判定します。しかし,まだ学習していないスマートフォンを撮影して,SOINNで認識できるかどうかを試すと,理解できません。そこで,インターネットからスマートフォンの画像を100枚ほどダウンロードし,学習させて判定させると,スマートフォンと認識します。
SOINNはこのようなパターン認識だけでなく,連想,推論にも使うことができます。人間は初めて見た花で,花の名前は分からなくても,それが花だと認識することができます。つまり,人間は初めて見る対象でも,相応に認識することができるのです。それは花について,一般的な概念を持っているからで,花はこういう属性を持っていると考えることができるからです。これに近いと考えられるのが転移学習で,対象について学習するのではなく,属性と呼ぶ基本的な概念を学習し,その組み合わせで未学習物体を認識していくものです(図1)。
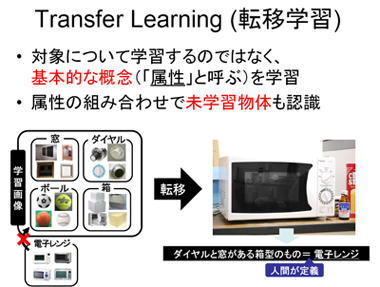
SOINNは転移学習に未知のものを認識する

東京工業大学 長谷川 修
1993年,東京大学大学院 電子工学専攻 博士課程修了,博士(工学)。同年,通商産業省(現経済産業省) 工業技術院 電子技術総合研究所 研究員。1999年,米国カーネギーメロン大学 ロボティクス研究所 客員研究員。2002年,東京工業大学 大学院理工学研究科付属 像情報工学研究施設 助教授。2010年,東京工業大学 像情報工学研究所 准教授。 長谷川研究室 http://haselab.info/